1问题描述
数码问题常被用来演示如何在状态空间中生成动作序列。一个典型的例子是15数码问题,它是由放在一个4×4的16宫格棋盘中的15个数码(1-15)构成,棋盘中的一个单元是空的,它的邻接单元中的数码可以移到该单元中,通过这样不断地移动数码来改变棋盘布局,使棋盘从给定的初始棋局变为目标棋局(图1)。【数字华容道】
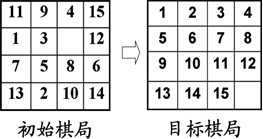
图1-1. 十五数码问题
2.知识表达
常见的知识表达有状态空间、与/或图、语义网、谓词逻辑等。状态空间是表示问题及其搜索过程的一种方法,是人工智能最基本的形式化方法。对于数码问题,使用状态空间来描述更为直观易懂,更有助于对算法的理解,故本文采用状态空间来对问题进行表达。
状态空间的三要素:状态、操作符、状态空间。
(1).状态S:十五数码问题中,每种棋局就是一个状态,所有棋局就是状态集合S,其中共有16!=209227898888000个状态。
(2).操作符F:使用最简化4个操作:分别向上、下、左、右移动空白单元,将操作符作用到某一状态即可从该状态转移到另一状态。但值得注意的是,并不是所有状态都可以执行这4个操作符。F = {上, 下, 左, 右}
(3).状态空间(S, F, G),其中状态空间图G的一部分如图1-2所示。

图1-2. 十五数码的部分状态空间图
2. A*算法
2.1算法简介
A*算法是BFS的一个变种,不同于BFS的是,每次选择节点进行生成的时候,优先选择估价函数最小的节点,把原来的BFS算法的无启发式的搜索改成了启发式的搜索,可以有效的减少节点的搜索个数。其估价函数f(x)= g(x)+h(x)的设计对搜索效率的影响是至关重要的,对于十五数码问题的估价函数中的g(x)我们选择从初始状态到当前状态x的操作符个数,即搜索树中x状态的深度。对于启发函数h(x),本文使用了两种方案:
(1).状态x中“不在位”的数码的个数,即当前状态x与目标状态不同元素的个数;
(2).曼哈顿距离,即当前状态x与目标状态不同元素之间对应横纵坐标差的绝对值之和。
2.2 算法原理
从初始状态S_0出发,分别采用不同的操作符作用于生成新的状态x并将其加入open表中(对应到状态空间图中便是根节点生成新的子节点n) ,接着从open表中按照某种限制或策略选择一个状态x使操作符作用于x又生成了新的状态并加入open表中(状态空间图中相应也产生了新的子节点),如此不断重复直到生成目标状态。
对于以上所述的“某种策略”,在图搜索过程中,若该策略是依据进行排序并选取最小的估价值,则称该过程为A算法。其中:
是从初始状态S_0经由状态x到目标状态S_G的代价估计
是在状态空间中从初始状S_0态到状态x的实际代价
是从状态x到目标状态S_G的最佳路径的代价
A算法中,若对所有的x存在h(x)≤,则称h(x)为的下限,表示某种偏于保守的估计。采用的下限h(x)为启发函数的A算法,称为A*算法,其中限制:h(x)≤h*(x)十分重要,它能保证A*算法找到最优解。在本问题中,g(x)相对容易得到,就是从初始节点到当前节点的路径代价,即当前节点在搜索树中的深度。关键在于启发函数h(x)的选择,A*算法的搜索效率很大程度上取决于估价函数h(x)。一般而言,满足h(x)≤h*(x)前提下,h(x)的值越大越好,说明其携带的启发性信息越多,A*算法搜索时扩展的节点就越少,搜索效率就越高。
传统的BFS是选取当前节点在搜索树中的深度作为g(x),但没有使用启发函数h(x),在找到目标状态之前盲目搜索,生成了过多的节点,因此搜索效率相对较低。本文分别使用不在位的元素个数和曼哈顿距离作为启发函数h(x)。每次从open表中选取时,优先选取估价函数最小的状态来扩展。
2.3 算法流程
本算法只考虑找到一条最优解即可,不需要找到所有可行解。
初始化两个表为空:open表和close表
1). 将初始节点加入open表(其父节点指针为null)
2). 若open表为空,则问题无解,退出。
3). 在open表中取出f(x)最小的节点作为当前节点x,并放入close表中;
4). 判断节点x是否为目标节点:若是,则找到问题的解,退出。
5). 若节点x不可扩展,则转到第2)步;
6). 扩展节点x(分别按照上、下、左、右方向移动空格并且操作起作用)得到多个子节点,计算它们的估价值并配置其父节点指针指向x,挨个判断每个子节点是否已经在open表中:
如果open表已有该子节点,比较二者的估价函数f(x)值,如果先前的f(x)大于现在新生成的子节点,则更新其为新生成的子节点,否则放弃加入,考察下一个子节点;(事实上,它们的h(x)是相同的,先出现的节点其g(x)不会大于后生成的,所以此步是没有必要的)
如果open表中没有该子节点且close表中也没有,则将该子节点加入open表中。
转到第2)步(对于open表没有该子节点但close表中有的情况不予处理,因为如果close表中节点的f(x)小于现在新生成的子节点,那么前者的子节点的估价函数也会小于后者子节点的估价函数,相应地也先被扩展,最终也会最先找到最优解,因为本文的目标是找到一条最佳路径即可)。
【一个思考:open表是不是可以考虑用set而不是用list,因为对于先加入open set的节点,其f(x)必然不会大于后加入的节点,所以后生成的节点在加入open set的时候,直接被拒绝就可以了】
【不清楚对不对,可以先看下】